



/*****************************************
二轮蓝牙小车——左轮测试
运动过程:左轮正转2s,停止2s,反转2s,停止2s。循环
占用4、5引脚
2015.05.01
——by 极客工坊 血阳
——王小丰
*****************************************/
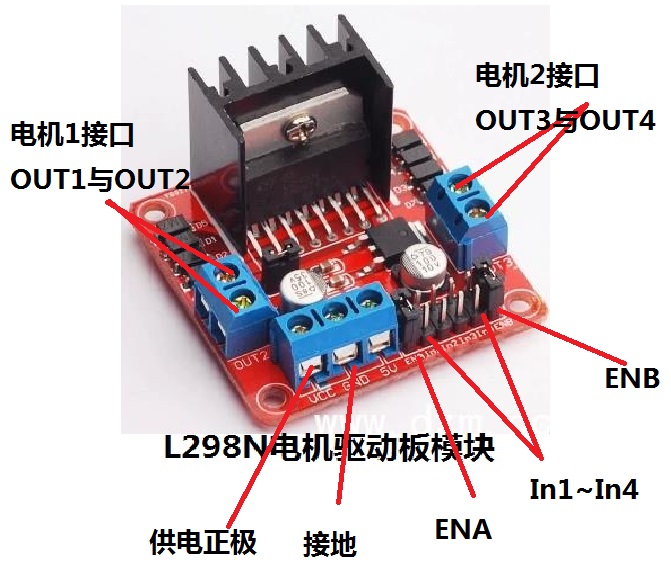
#define IN1 4
#define IN2 5 //定义In1接arduino的4引脚,In2接5引脚
void setup()
{
pinMode(IN1,OUTPUT);
pinMode(IN2,OUTPUT);
}
void loop()
{
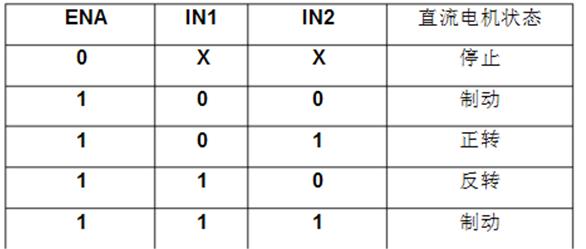
digitalWrite(IN1,HIGH);
digitalWrite(IN2,LOW); //左轮前进
delay(2000);
digitalWrite(IN1,LOW);
digitalWrite(IN2,LOW); //左轮静止不动
delay(2000);
digitalWrite(IN1,LOW);
digitalWrite(IN2,HIGH); //左轮后退
delay(2000);
digitalWrite(IN1,LOW);
digitalWrite(IN2,LOW); //左轮静止不动
delay(2000);
}
/*****************************************
二轮蓝牙小车——右轮测试
运动过程:右轮正转2s,停止2s,反转2s,停止2s。循环
占用4、5引脚
2015.05.01
——by 极客工坊 血阳
——王小丰
*****************************************/
#define IN3 6
#define IN4 7 //定义IN3接arduino的6引脚,IN4接7引脚
void setup()
{
pinMode(IN3,OUTPUT);
pinMode(IN4,OUTPUT);
}
void loop()
{
digitalWrite(IN3,HIGH);
digitalWrite(IN4,LOW); //右轮前进
delay(2000);
digitalWrite(IN3,LOW);
digitalWrite(IN4,LOW); //右轮静止不动
delay(2000);
digitalWrite(IN3,LOW);
digitalWrite(IN4,HIGH); //右轮后退
delay(2000);
digitalWrite(IN3,LOW);
digitalWrite(IN4,LOW); //右轮静止不动
delay(2000);
}

/*****************************************
二轮蓝牙小车
运动过程:前进2s,停止1s,接着后退2s停止3s
占用4、5引脚
2015.05.01
——by 极客工坊 血阳
——王小丰
*****************************************/
#define IN1 4
#define IN2 5 //定义In1接arduino的4引脚,In2接5引脚
#define IN3 6
#define IN4 7 //定义IN3接arduino的6引脚,IN4接7引脚
void setup()
{
pinMode(IN1,OUTPUT);
pinMode(IN2,OUTPUT);
pinMode(IN3,OUTPUT);
pinMode(IN4,OUTPUT);
}
void loop()
{
digitalWrite(IN1,HIGH);
digitalWrite(IN2,LOW); //左轮前进
digitalWrite(IN3,HIGH);
digitalWrite(IN4,LOW); //右轮前进
delay(2000);
digitalWrite(IN1,LOW);
digitalWrite(IN2,LOW); //左轮静止不动
digitalWrite(IN3,LOW);
digitalWrite(IN4,LOW); //右轮静止不动
delay(1000);
digitalWrite(IN1,LOW);
digitalWrite(IN2,HIGH); //左轮后退
digitalWrite(IN3,LOW);
digitalWrite(IN4,HIGH); //右轮后退
delay(2000);
digitalWrite(IN1,LOW);
digitalWrite(IN2,LOW); //左轮静止不动
digitalWrite(IN3,LOW);
digitalWrite(IN4,LOW); //右轮静止不动
delay(3000);
}
/**************************************************
forward子函数——前进子函数
函数功能:控制车前进
**************************************************/
void forward( )
{
digitalWrite(IN1,HIGH);
digitalWrite(IN2,LOW); //左轮前进
digitalWrite(IN3,HIGH);
digitalWrite(IN4,LOW); //右轮前进
}
/**************************************************
back子函数——后退子函数
函数功能:控制车后退
**************************************************/
void back( )
{
digitalWrite(IN1,LOW);
digitalWrite(IN2,HIGH); //左轮后退
digitalWrite(IN3,LOW);
digitalWrite(IN4,HIGH); //右轮后退
}
/**************************************************
turnLeft子函数——左转子函数
函数功能:控制车左转
**************************************************/
void turnLeft( )
{
digitalWrite(IN1,LOW);
digitalWrite(IN2,LOW); //左轮静止不动
digitalWrite(IN3,HIGH);
digitalWrite(IN4,LOW); //右轮前进
}
/**************************************************
turnbackLeft子函数——左后转弯子函数
函数功能:控制车左后转弯
**************************************************/
void turnbackLeft( )
{
digitalWrite(IN1,LOW);
digitalWrite(IN2,LOW); //左轮静止不动
digitalWrite(IN3,LOW);
digitalWrite(IN4,HIGH); //右轮后退
}
/**************************************************
turnRight子函数——右后转弯转子函数
函数功能:控制车右后转弯
**************************************************/
void turnRight( )
{
digitalWrite(IN1,HIGH);
digitalWrite(IN2,LOW); //左轮前进
digitalWrite(IN3,LOW);
digitalWrite(IN4,LOW); //右轮静止不动
}
/**************************************************
turnbackRight子函数——右转子函数
函数功能:控制车右转
**************************************************/
void turnbackRight( )
{
digitalWrite(IN1,LOW);
digitalWrite(IN2,HIGH); //左轮后退
digitalWrite(IN3,LOW);
digitalWrite(IN4,LOW); //右轮静止不动
}
/**************************************************
turnLeftOrigin子函数——原地左转子函数
函数功能:控制车原地左转
**************************************************/
void turnLeftOrigin( )
{
digitalWrite(IN1,LOW);
digitalWrite(IN2,HIGH); //左轮后退
digitalWrite(IN3,HIGH);
digitalWrite(IN4,LOW); //右轮前进
}
/**************************************************
turnRightOrigin子函数——原地右转子函数
函数功能:控制车原地右转
**************************************************/
void turnRightOrigin( )
{
digitalWrite(IN1,HIGH);
digitalWrite(IN2,LOW); //左轮前进
digitalWrite(IN3,LOW);
digitalWrite(IN4,HIGH); //右轮后退
}
/**************************************************
stop子函数—停止子函数
函数功能:控制车停止
**************************************************/
void _stop()
{
digitalWrite(IN1,LOW);
digitalWrite(IN2,LOW); //左轮静止不动
digitalWrite(IN3,LOW);
digitalWrite(IN4,LOW); //右轮静止不动
}
/*****************************************
二轮蓝牙小车
运动过程:利用函数:前进2s—后退2s—前左转2s—后左转2s
—前右转2s—后右转2s—原地左转2s—原地右转2s—停止3s。
2015.05.01
——by 极客工坊 血阳
——王小丰
*****************************************/
#define IN1 4
#define IN2 5 //定义In1接arduino的4引脚,In2接5引脚
#define IN3 6
#define IN4 7 //定义IN3接arduino的6引脚,IN4接7引脚
void forward( );
void back( );
void turnLeft( );
void turnRight( );
void turnbackLeft( );
void turnbackRight( );
void turnLeftOrigin( );
void turnRightOrigin( );
void _stop(); //这里是把我们用到的函数都声明一遍
void setup()
{
pinMode(IN1,OUTPUT);
pinMode(IN2,OUTPUT);
pinMode(IN3,OUTPUT);
pinMode(IN4,OUTPUT);
}
void loop()
{
forward( );
delay(2000);
back( );
delay(2000);
turnLeft( );
delay(2000);
turnbackLeft( );
delay(2000);
turnRight( );
delay(2000);
turnbackRight( );
delay(2000);
turnLeftOrigin( );
delay(2000);
turnRightOrigin( );
delay(2000);
_stop();
delay(3000);
}
/**************************************************
forward子函数——前进子函数
函数功能:控制车前进
**************************************************/
void forward( )
{
digitalWrite(IN1,HIGH);
digitalWrite(IN2,LOW); //左轮前进
digitalWrite(IN3,HIGH);
digitalWrite(IN4,LOW); //右轮前进
}
/**************************************************
back子函数——后退子函数
函数功能:控制车后退
**************************************************/
void back( )
{
digitalWrite(IN1,LOW);
digitalWrite(IN2,HIGH); //左轮后退
digitalWrite(IN3,LOW);
digitalWrite(IN4,HIGH); //右轮后退
}
/**************************************************
turnLeft子函数——左转子函数
函数功能:控制车左转
**************************************************/
void turnLeft( )
{
digitalWrite(IN1,LOW);
digitalWrite(IN2,LOW); //左轮静止不动
digitalWrite(IN3,HIGH);
digitalWrite(IN4,LOW); //右轮前进
}
/**************************************************
turnbackLeft子函数——左后转弯子函数
函数功能:控制车左后转弯
**************************************************/
void turnbackLeft( )
{
digitalWrite(IN1,LOW);
digitalWrite(IN2,LOW); //左轮静止不动
digitalWrite(IN3,LOW);
digitalWrite(IN4,HIGH); //右轮后退
}
/**************************************************
turnRight子函数——右后转弯转子函数
函数功能:控制车右后转弯
**************************************************/
void turnRight( )
{
digitalWrite(IN1,HIGH);
digitalWrite(IN2,LOW); //左轮前进
digitalWrite(IN3,LOW);
digitalWrite(IN4,LOW); //右轮静止不动
}
/**************************************************
turnbackRight子函数——右转子函数
函数功能:控制车右转
**************************************************/
void turnbackRight( )
{
digitalWrite(IN1,LOW);
digitalWrite(IN2,HIGH); //左轮后退
digitalWrite(IN3,LOW);
digitalWrite(IN4,LOW); //右轮静止不动
}
/**************************************************
turnLeftOrigin子函数——原地左转子函数
函数功能:控制车原地左转
**************************************************/
void turnLeftOrigin( )
{
digitalWrite(IN1,LOW);
digitalWrite(IN2,HIGH); //左轮后退
digitalWrite(IN3,HIGH);
digitalWrite(IN4,LOW); //右轮前进
}
/**************************************************
turnRightOrigin子函数——原地右转子函数
函数功能:控制车原地右转
**************************************************/
void turnRightOrigin( )
{
digitalWrite(IN1,HIGH);
digitalWrite(IN2,LOW); //左轮前进
digitalWrite(IN3,LOW);
digitalWrite(IN4,HIGH); //右轮后退
}
/**************************************************
stop子函数—停止子函数
函数功能:控制车停止
**************************************************/
void _stop()
{
digitalWrite(IN1,LOW);
digitalWrite(IN2,LOW); //左轮静止不动
digitalWrite(IN3,LOW);
digitalWrite(IN4,LOW); //右轮静止不动
}
void setup()
{
pinMode(13,OUTPUT);
Serial.begin(9600);
}
int i;
void loop()
{
if(Serial.available()>0)
{
i=Serial.read();
switch(i)
{
case'1':
{digitalWrite(13,HIGH);break;}
case'2':
{digitalWrite(13,LOW);break;}
}
}
}
/*****************************************
二轮蓝牙小车
2015.05.01
——by 极客工坊 血阳
——王小丰
*****************************************/
#define IN1 4
#define IN2 5 //定义In1接arduino的4引脚,In2接5引脚
#define IN3 6
#define IN4 7 //定义IN3接arduino的6引脚,IN4接7引脚
void forward( );
void back( );
void turnLeft( );
void turnRight( );
void turnbackLeft( );
void turnbackRight( );
void turnLeftOrigin( );
void turnRightOrigin( );
void _stop(); //这里是把我们用到的函数都声明一遍
void setup()
{
pinMode(IN1,OUTPUT);
pinMode(IN2,OUTPUT);
pinMode(IN3,OUTPUT);
pinMode(IN4,OUTPUT);
Serial.begin(9600);
}
int i;
void loop()
{
if(Serial.available())
{
i=Serial.read();
switch(i)
{
case'1':
{turnLeft( ); break; }
case'2':
{forward( ); break;}
case'3':
{turnRight( ); break;}
case'4':
{turnLeftOrigin( ); break;}
case'5':
{_stop(); break;}
case'6':
{turnRightOrigin( ); break;}
case'7':
{turnbackLeft( ); break;}
case'8':
{back( ); break;}
case'9':
{turnbackRight( ); break;}
}
}
}
/**************************************************
forward子函数——前进子函数
函数功能:控制车前进
**************************************************/
void forward( )
{
digitalWrite(IN1,HIGH);
digitalWrite(IN2,LOW); //左轮前进
digitalWrite(IN3,HIGH);
digitalWrite(IN4,LOW); //右轮前进
}
/**************************************************
back子函数——后退子函数
函数功能:控制车后退
**************************************************/
void back( )
{
digitalWrite(IN1,LOW);
digitalWrite(IN2,HIGH); //左轮后退
digitalWrite(IN3,LOW);
digitalWrite(IN4,HIGH); //右轮后退
}
/**************************************************
turnLeft子函数——左转子函数
函数功能:控制车左转
**************************************************/
void turnLeft( )
{
digitalWrite(IN1,LOW);
digitalWrite(IN2,LOW); //左轮静止不动
digitalWrite(IN3,HIGH);
digitalWrite(IN4,LOW); //右轮前进
}
/**************************************************
turnbackLeft子函数——左后转弯子函数
函数功能:控制车左后转弯
**************************************************/
void turnbackLeft( )
{
digitalWrite(IN1,LOW);
digitalWrite(IN2,LOW); //左轮静止不动
digitalWrite(IN3,LOW);
digitalWrite(IN4,HIGH); //右轮后退
}
/**************************************************
turnRight子函数——右后转弯转子函数
函数功能:控制车右后转弯
**************************************************/
void turnRight( )
{
digitalWrite(IN1,HIGH);
digitalWrite(IN2,LOW); //左轮前进
digitalWrite(IN3,LOW);
digitalWrite(IN4,LOW); //右轮静止不动
}
/**************************************************
turnbackRight子函数——右转子函数
函数功能:控制车右转
**************************************************/
void turnbackRight( )
{
digitalWrite(IN1,LOW);
digitalWrite(IN2,HIGH); //左轮后退
digitalWrite(IN3,LOW);
digitalWrite(IN4,LOW); //右轮静止不动
}
/**************************************************
turnLeftOrigin子函数——原地左转子函数
函数功能:控制车原地左转
**************************************************/
void turnLeftOrigin( )
{
digitalWrite(IN1,LOW);
digitalWrite(IN2,HIGH); //左轮后退
digitalWrite(IN3,HIGH);
digitalWrite(IN4,LOW); //右轮前进
}
/**************************************************
turnRightOrigin子函数——原地右转子函数
函数功能:控制车原地右转
**************************************************/
void turnRightOrigin( )
{
digitalWrite(IN1,HIGH);
digitalWrite(IN2,LOW); //左轮前进
digitalWrite(IN3,LOW);
digitalWrite(IN4,HIGH); //右轮后退
}
/**************************************************
stop子函数—停止子函数
函数功能:控制车停止
**************************************************/
void _stop()
{
digitalWrite(IN1,LOW);
digitalWrite(IN2,LOW); //左轮静止不动
digitalWrite(IN3,LOW);
digitalWrite(IN4,LOW); //右轮静止不动
}
联系客服


